


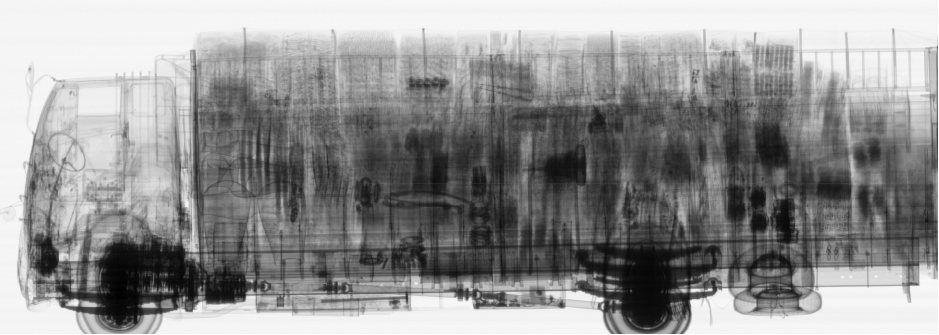
Przenośny system kontroli ładunków i pojazdów
Przenośny system kontroli ładunków i pojazdów BGV6100 wyposażony jest w elektroniczny akcelerator liniowy (Linac) i nowy detektor ciał stałych PCRT, który wykorzystuje promieniowanie rentgenowskie o podwójnej energii i zaawansowane algorytmy identyfikacji materiałów w celu uzyskania perspektywicznego skanowania i obrazowania ładunku i pojazdu, a także identyfikacji towarów przemycanych.System posiada dwa tryby pracy: tryb przejazdowy oraz tryb skanowania mobilnego.W trybie skanowania mobilnego system porusza się po szynie naziemnej w celu skanowania pojazdów towarowych.Wdrożenie systemu uwzględnia wygodę użytkowania na miejscu.Konsola operacyjna znajduje się przy wejściu do pojazdu.Personel przewodnika front-end jest odpowiedzialny za rozpoczęcie procesu kontroli po przygotowaniu pojazdu i może obserwować cały proces kontroli przez cały czas.Po wykryciu nieprawidłowości proces kontroli można natychmiast przerwać.Po zakończeniu interpretacji obrazu obrazowego pojazdu, interpreter obrazu pojazdu z tyłu może komunikować się z przewodnikiem z przodu za pośrednictwem konsoli i może przekazać wynik interpretacji za pomocą odpowiedniego sygnału ostrzegawczego.
- Większa przepustowość, nie mniej niż 120 pojazdów ciężarowych na godzinę w trybie przejazdowym i nie mniej niż 25 pojazdów ciężarowych na godzinę w trybie skanowania mobilnego
- Bezpieczeństwo radiacyjne dla kierowcy, posiada funkcję automatycznego wyłączania kabiny ciężarówki i jeden kluczyk do trybu skanowania mobilnego
- Technologia IDE, wspiera dyskryminację materiałową
- Bogaty interfejs integracji systemu
- Większa zdolność penetracji stali
- Zaawansowany system zarządzania informacją o obrazie.Przechowywanie, wyszukiwanie, przeglądanie, eksportowanie i inne funkcje informacji o pojeździe, w tym obrazów perspektywicznych, wspierają funkcje scentralizowanego zarządzania siecią.
- Interfejs operacyjny klienta: Projekt interfejsu operacyjnego klienta systemu oprogramowania sprzętu jest rozsądny i przyjazny dla użytkownika, interfejs jest przejrzysty i zwięzły, obsługa jest wygodna, konfiguracja modułu funkcyjnego jest intuicyjna, układ jest rozsądny, a konserwacja jest proste.





